





Safe & Inclusive Transport
Sustainable Mobility of People and Goods
Efficient & Resilient Systems
Efficient & Resilient Systems
- Developments in the field of innovative binders for asphalt mixtures

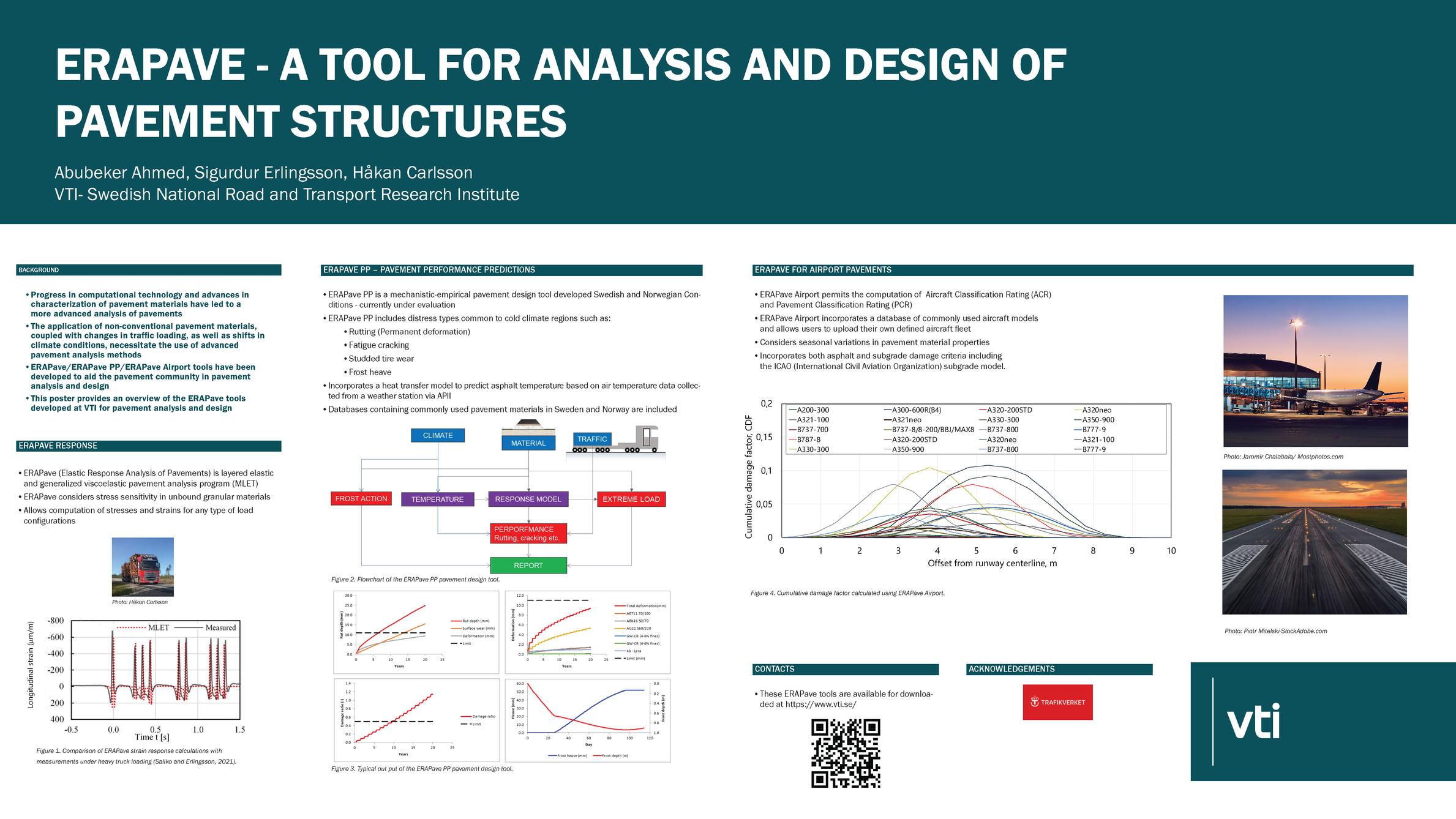
- ERAPave - A Tool for Analysis and Design of Pavement Structures
- Academics4rail, EU-Rail, PhD, academic, railway research
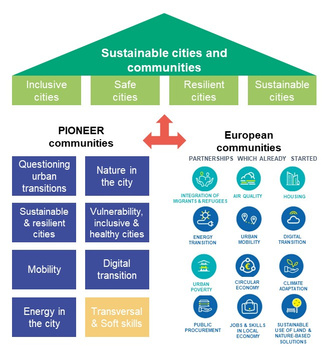
- PIoneer+ Co-creation of European universities with their local ecosystem
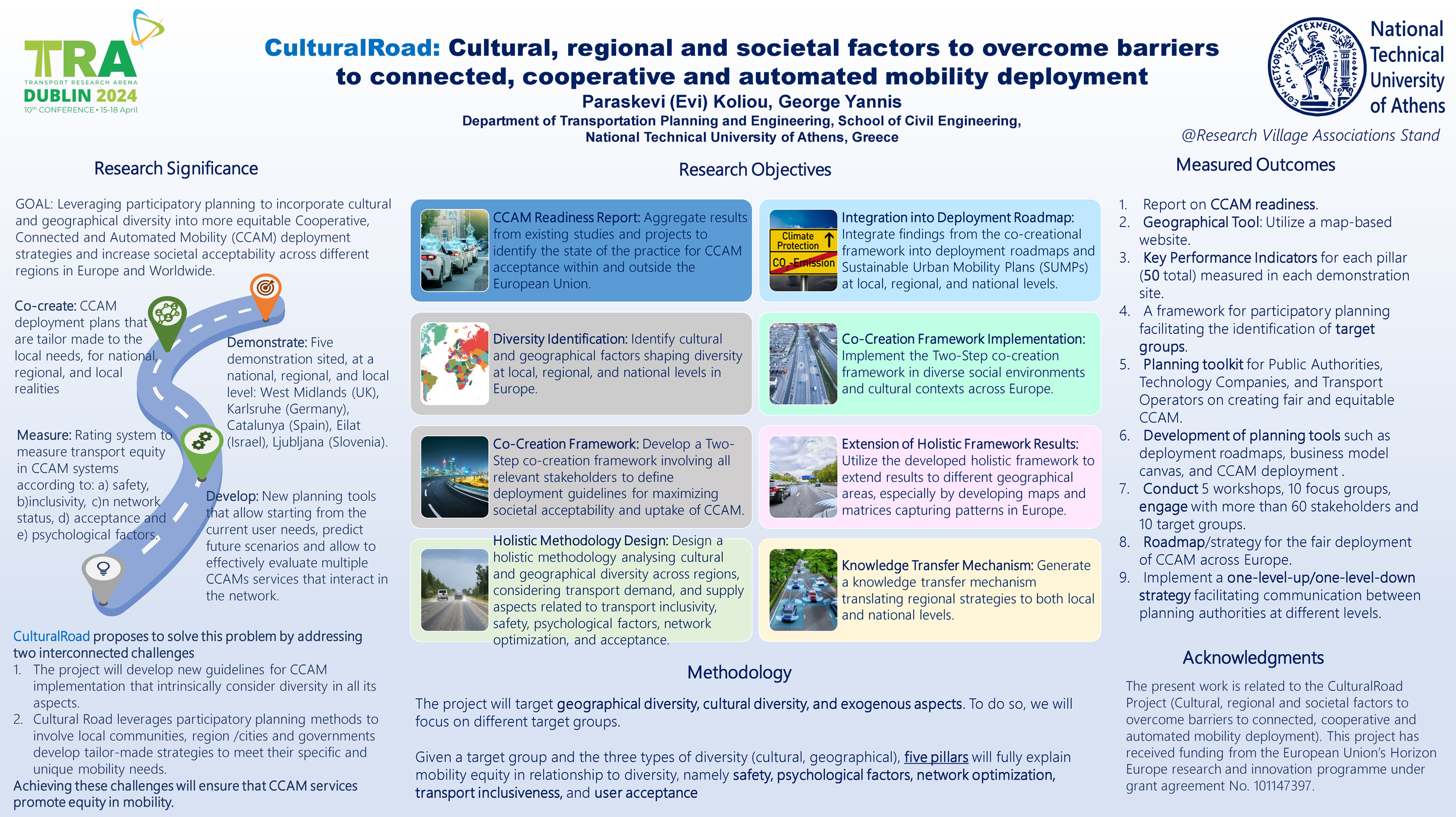
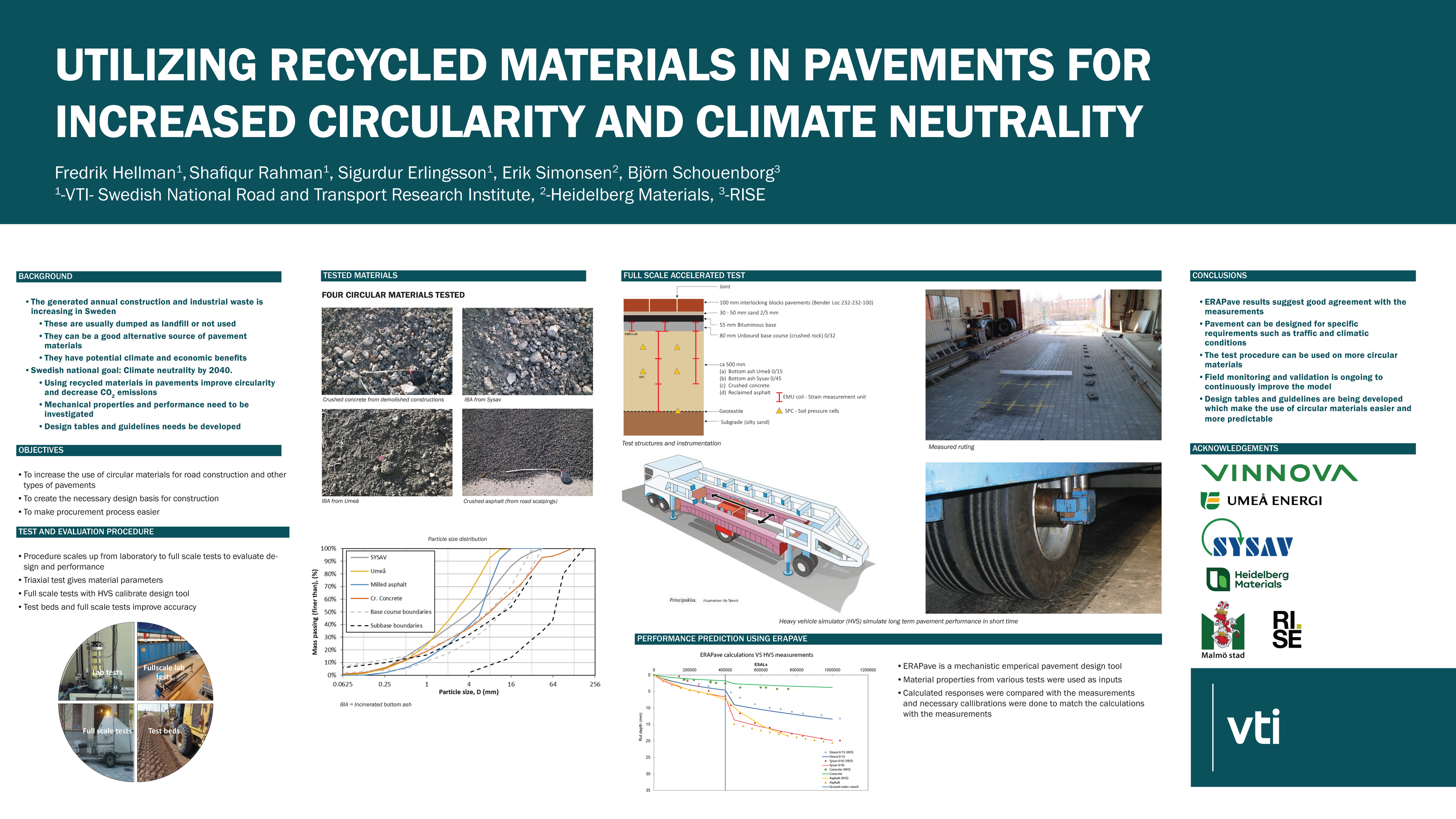
- Utilizing Recycled Materials in Pavements for Increased Circularity and Climate Neutrality
- CapaCITIES (CSA) - Building Capacities for the Climate Neutral and Smart Cities Mission.
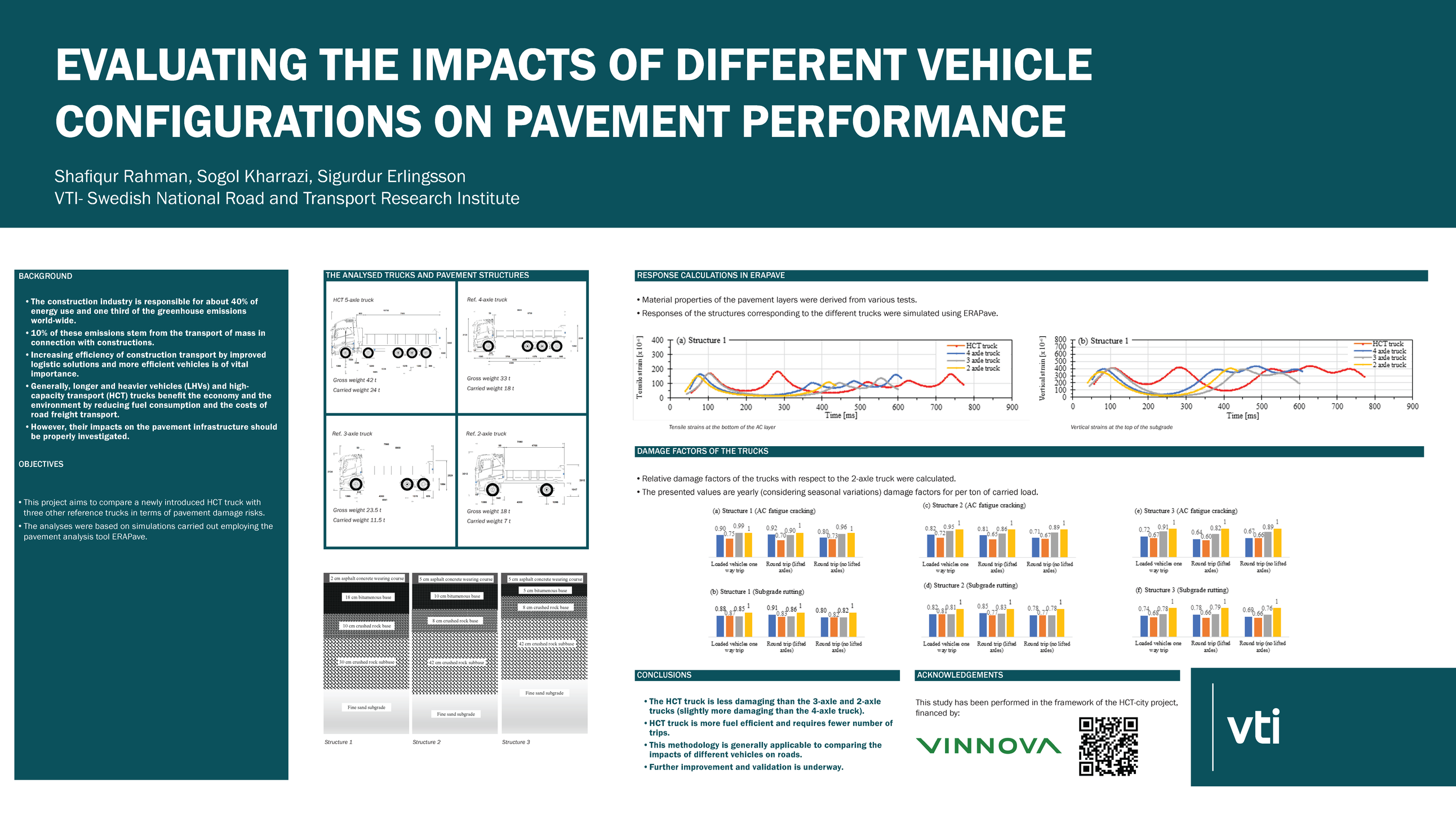
- Evaluating the Impacts of Different Vehicle Configurations on Pavement Performance
Collaborative Digitalisation



WHAT IS PODS4RAIL?
Pods4Rail, funded by the European Union (FA7) worth EUR 2.9 million, launched in September 2023 with 15 partners, aims to address the
complex challenges facing the
transport sector. With a focus on
intermodal mobility, the project envisions a future where autonomous pod systems seamlessly integrate
with existing rail infrastructure. By optimizing connectivity, efficiency, and sustainability, Pods4Rail promises to shape a brighter future for European mobility.


Funded by the European Union. Views and opinions expressed are however those of the author(s) only and do not necessarily reflect those of the European Union or Europe’s Rail Joint Undertaking. Neither the European Union nor the granting authority can be held responsible for
them.
DEVELOPING A NEW KIND OF MOBILITY SYSTEM.

Project coordinator:
Dirk Winkler Siemens Mobility GmbH Siemenspromenade 6
91058 Erlangen
Germany
one for all-Vision © SIEMENS / moodley
For more information, visit www.pods4rail.eu


Partners:
Siemens Mobility GmbH, Hacon, DLR German Aerospace Center, Trafikverket Swedish transport administration, Swedish Royal Institute of Technology (KTH), European rail Research Network of Excellence (Eurnex), Technical University of Madrid (UPM), Prorail BV, Netherlands organisation for applied scientific research (TNO), University Gustave Eiffel, University of West Bohemia (UWB), moodley strategy & design group, Railenium, Delft University of Technology
one for all-Vision © SIEMENS / moodley












































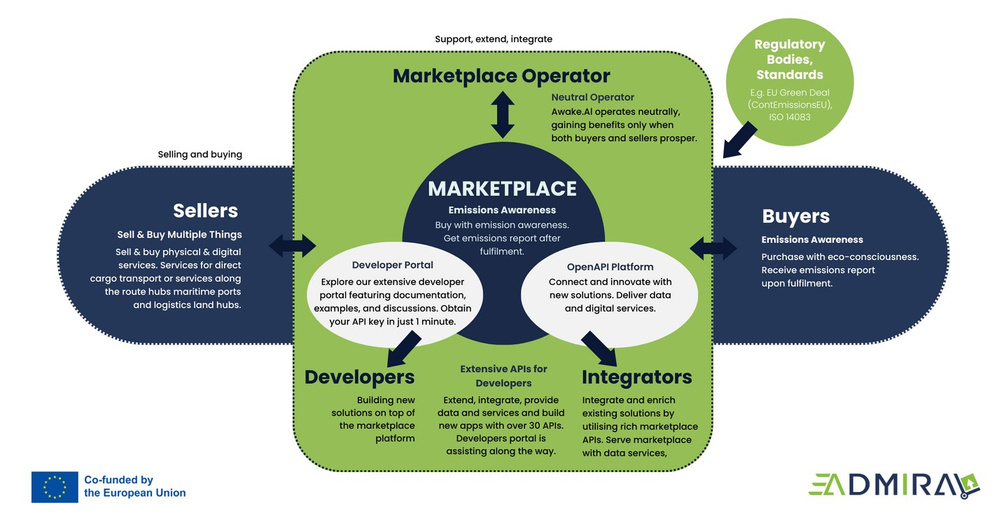
Emissions-aware marketplace for multimodal logistics services
Data for Scope 3 emissions reporting
Selection of most emissions-efficient transportation provider
Developer Portal connecting IT developers and integrators


www.admiral-project.eu
Join the Stakeholder Collaborative Forum!
20 partners from 9 EU countries
4 pilots / Portugal-Spain, Slovenia-Croatia, Lithuania, Finland 3 years / 01/05/2023-30/04/2026
7.3M€ EU Funding










































































































































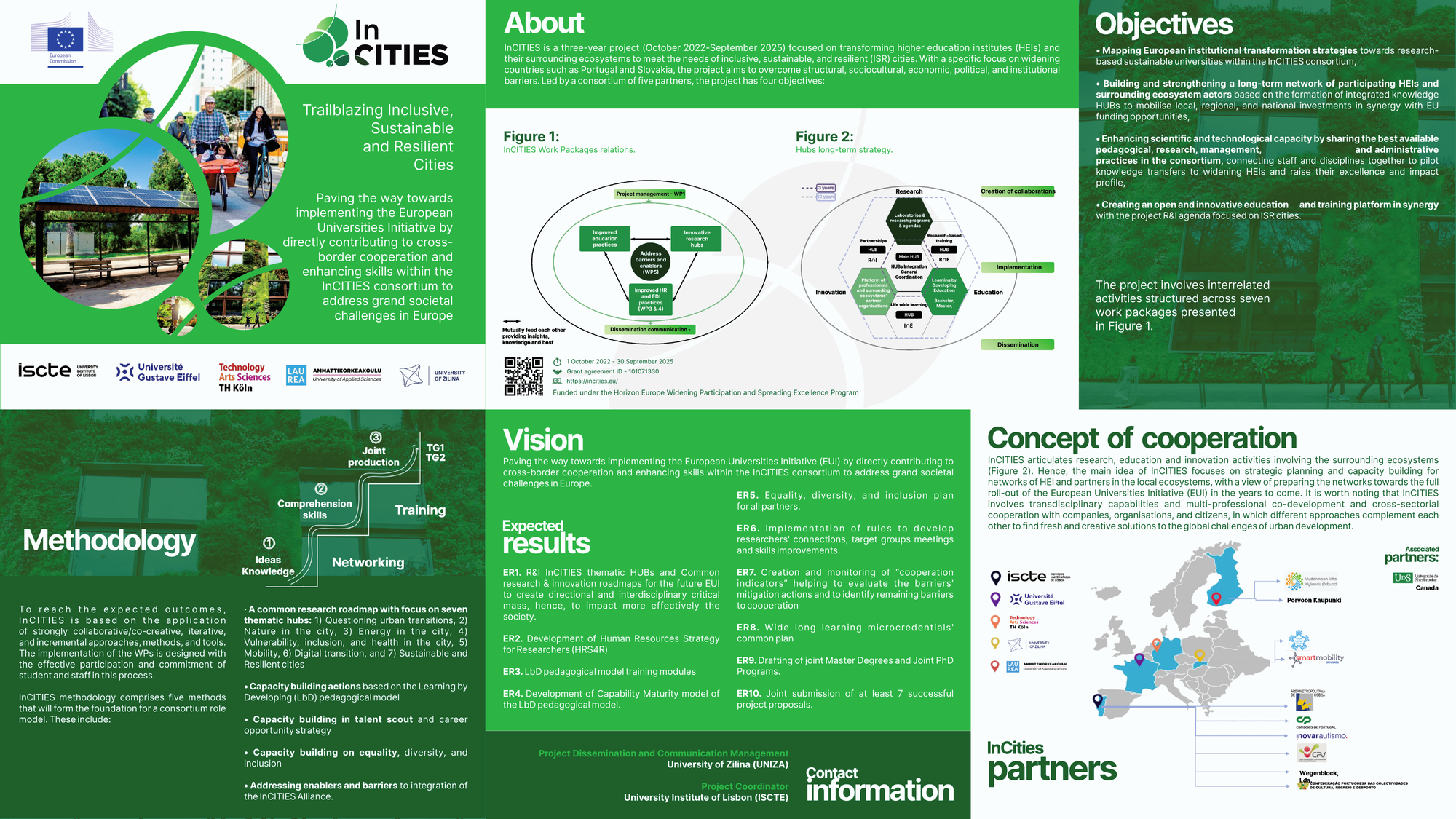
Our ambition: to support cities in meeting their challenges as we transform ourselves
We are committed to two transformations that are two sides of our single mission.
• To help cities thrive.
• To transform ourselves.




Our three strategic goals

Goal 1: Promote talent development and circulation
• Objective 1: Foster a European approach to urban life and urban transition based on
cooperation, exchange and talent mobility in a spirit of equality, diversity and
inclusion.
• Objective 2: Offer tailored support for the development of leadership and human
capital to broaden mindsets and enhance skills to address societal transitions in
cities.
Goal 2: Foster challenge-based knowledge creation and transmission
• Objective 3: Stimulate, develop and share challenge-based learning approaches in
an interdisciplinary perspective tackling urban transition
• Objective 4: Facilitate and nourish society-oriented research and innovation that
tackle urban transitions.
• Objective 5: Co-create and disseminate solutions with urban, academic, economic,
social and political ecosystems to address common challenges.
Goal 3: Transform incentives and institutional models
• Objective 6: Build an efficient and sustainable governance and administration model
for the Alliance.
• Objective 7: Orchestrate and embed inter-institutional learning and collaboration to
enable the long-term alignment of strategies and institutional pathways.
• Objective 8: Share results and experiences to promote SDG11 and inspire the
renewal of the European higher education and research landscape.



European Mobility Data Spaces Landscape
Common European Data Space
European Mobility Data Space

European AgricultureData Space
European Cultural
Heritage Data Space
European Energy Data
Space
European Finance Data
Space
European Green Deal
Data Space
European Health Data
Space
European Language Data
Space
European Manufacturing
Data Space
European Media Data
Space
European Public
Administration Data Space
European Research and
Innovation Data Space
European Skills Data
Space
European TourismData
Space
Data collections of European bodies (e.g. RINF)
National Mobility Data Spaces (e.g. NAP)
SectorData Spaces
(e.g. IATA)



Base-X
…

Data Spaces following the Gaia-X principles

Base-X
…



FleetMgt
Parking
RoadCon
App-Store
…
InfraCon PublicTra Charging
…
other Data Spaces
Base-X
…

Roadmaps for AI Integration in the Rail Sector: the RAILS project and beyond
123,45,6,732211811
L. De Donato, R. Tang, N. Bešinović
, F. Flammini
, R.M.P. Goverde, Z. Lin, R. Liu, S. Marrone, E. Napoletano, R. Nardone, S. Santini, V. Vittorini
1. University of Naples Federico II, Naples, Italy | 2. University of Leeds, Leeds, UK | 3. Delft University of Technology, Delft, Netherlands 4. Technical University of Dresden, Dresden, Germany | 5. University of Applied Sciences and Arts of Southern Switzerland, Lugano, Switzerland 6. MälardalenUniversity, Eskilstuna, Sweden | 7. Linnaeus University, Växjö, Sweden | 8. University of Naples “Parthenope”, Naples, Italy

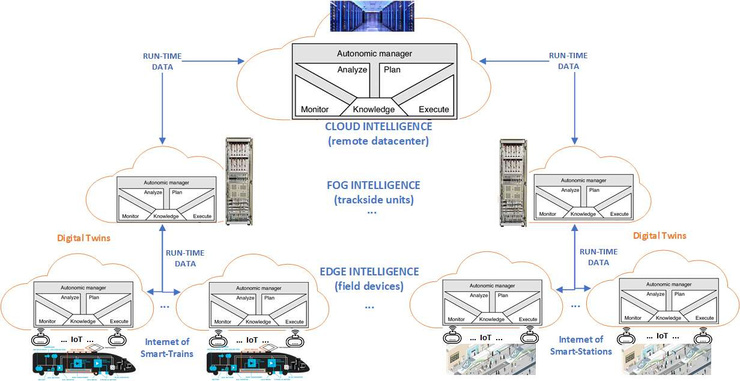
Towards Intelligent Railways
Automatic Train Protection (ATP)
Acting as Safety Envelope to ATO/ITO by ensuring
train interdistance, train and route integrity, and so on …
Intelligent Train Operation (ITO)
Use AI to improve traditional Automatic Train Operation (ATO) Energy Comfort
Optimisation … Capacity … Optimisation
Optimisation
Intelligent Train Protection (ITP)
Use AI to replace, support, or extend ATP functionalities Obstacle … Signal
Detection Recognition
SIL4
SIL?
Conclusions
Introduction

The overall objective of the RAILS research project has been to investigate the potential and limitations of emerging artificial
intelligence and machine learning paradigms in the rail sector, in order tocontribute to roadmaps for future research in next generation signallingsystems, operational intelligence, and network management. RAILS has produced knowledge, groundbreaking research and experimental proof-of-concepts for the adoption of AI in rail automation, predictive maintenance and defect detection, traffic planning and capacity optimization. To that aim, RAILS has combined AI paradigms with the Internet of Things (IoT) and big data analytics. The results of RAILS are expected to stimulate innovation and research to improve
reliability, safety, security, and performance in intelligent railways, also
considering emerging threats, safety and certification issues that must
be addressed in the context of trustworthy and explainable AI.
WP1: State-of-the-Art of AI in the Railway Transport
DISCOVER
WP6: Project Management
WP3
AI for Predictive Maintenance and Defect Detection
WP2
AI for Rail Safety and Automation
WP4
AI for Traffic Planning and Management
ASSESS
WP5: Dissemination and Future Roadmaps
LEARN
Project partners




The RAILS Roadmapping Process
Acknowledgments and Disclaimer

DISCOVER

Taxonomy and State-of-the-Art of AI in Railway
Survey (Academics & Practitioners)
Workshops ‘ AI4RA ILS’ series

Application Areas and Relevant Railway Problems

Maintenance and InspectionTraffic Planning and Management
Autonomous Driving and ControlRevenue Management
Passenger MobilitySafety and SecurityTransport Policy

Challenges


Data Availability Trustworthiness
AI Systems Certification Non-intrusiveness
...
D ir ections


Simulators
Data Augmentation Transfer Learning Explainable AI
Safety Envelope Audio/Video sensors …
ASSESS



Transferability Analysis

WP2
Obstacle detection on
Rail Tracks
Cooperative Driving for
Virtual Coupling
Case Study Definition
WP3
Level Crossings Smart
Maintenance
Rolling Stock Preventive
Maintenance
WP4
Primary Delay
Prediction
Incident Attribution
Analysis
Experimentation and Proofs-of-Concept Development
LEARN
Roadmaps Identification
This project has received funding from the Shift2Rail Joint Undertaking under the European Union’s Horizon 2020 research and innovation programme under grant agreement n. 881782 Rails. The JU receives support from the European Union’s Horizon 2020 research and innovation program and the Shift2Rail JU members other than the Union.
The information and views set out in this document are those of the
author(s) and do not necessarily reflect the official opinion of Shift2Rail
Joint Undertaking. The JU does not guarantee the accuracy of the data
included in this document. Neither the JU nor any person acting on the
JU’s behalf may be held responsible for the use which may be made of the
information contained therein.

Contact Information

FrancescoFlammini
IDSIA USI-SUPSI, Lugano, Switzerland
Tel: +41 798 498769
Email: francesco.flammini@supsi.ch
Web: https://tas.idsia.ch/
Project website: https://rails-project.eu/



Use-cases within Intelligent Railways
Vision-based Obstacle Detection on Rail Tracks Cooperative Driving for VC of Autonomous Trains Smart Maintenance at Level Crossings
Intelligent Rolling Stock Rostering Primary Delay Prediction
Incident Attribution Analysis






H2020 Project HERON
Improved Robotic Platform to perform Maintenance and Upgrading Roadworks
G. Andreoli(UGE), F. Schmidt (UGE), I. Katsamenis(ICCS), N. Bakalos(ICCS), Helen Oleynikova(ETHZ), Miquel Cantero(ROB), Carlos Martín-PortuguésMontoliu(ACCI), Yannis Handanos(OLO), Elena Avatangelou(INAC), Nikolaos Frangakis(IKH), Christos Polykretis(STWS), DimitriosBilionis(RISA), MarusaBenkic(CORTE), Dimitris Tsarpalis (RG)



Project HERON: scientific and technical content
Transpolis and RUPs testing






SCOPE : HERON isamong theprojectsfundedbytheEU undertheH2020programfor roadinfrastructure maintenance.WithinHERON's scopeis theimplementation ofaroadinfrastructure plan,
CONTEXT : The ForeverOpen Road (FOR) concept has been developed, with its national declinations (R5G in France for example) by the association of European Road Research Laboratories (FEHRL). HERON answers the three concepts of FOR, namely the resilient, the automated and the adaptable road (www.foreveropenroad.eu/). As outlined by FOR, HERON integrates existing technical components,includingoff-the-shelf technologiesandoutcomes from previousorongoingresearch projects.
GOAL : The goal of HERON is to develop an integrated automated system capable of conducting various road maintenance and improvement tasks, such as crack sealing, pothole patching, asphalt rejuvenation, autonomous replacement of Removable Urban Pavement (RUP) elements, and road marking/painting. Thus, HERON is tasked with supporting both pre- and post-intervention phases, which involve automated and controlled visual inspections, as well as the placement and removal of traffic cones.


Transpolis (France) is an 80-hectare testing facility established by a consortium of 5 entities, including Gustave Eiffel University, officially opened in 2019 (fig. 3). Primarly, it serves as a controlled environment for testing autonomous vehicles, thanks to several kilometers of roadways (notably 12 km in the “city area”) and all reinforced concrete buildings. The facility is equipped with various types of Vehicle-to-Everthing (V2X) and Vehicle-to-Infrastructure (V2I) communication capabilities, alongside camera surveillance.
In terms of telecommunications, Transpolis features over 320 km of optical fiber, providing access to an Ethernet network accros most areas of the facility. An open LoRa network spans the whole proving ground, enabling the installation and use of a wide array of Internet of Things (IoT) sensors. Additionally, the site is covered by a 5G network coming from an antenna located centrally within the tracks. Energy needs are met by a private electrical distribution network, ensuring power supply throughout the facility, particularly in the “city area”.

Transpolisserves as the proving ground for various use cases, including:
• • •
Detection and repair of road markings;
Detection and repair of cracks in reinforced concrete;
Continuous V2I communication, between the vehicle and road side units.
Figure 3 : Aerial view of Transpolissite
In the frame of urban planning for the future city, the concept of Removable Urban Pavement (RUP) is studied, using hexagonal prefabricated concrete slabs. These removable slabs facilitate quick access to networks, enhance the longevity of road surface properties and are recyclable. Their prefabrication allows for the incorporation of additional integrated functions such as various textures, porous, noise-reducing or pollution-absorbing surface, as well as the integration of sensors, among others). Therefore, regular inspection of the RUPs for potential anomalies and timely repairs is ofutmost importance


Two structural working of these RUP are possible:
• The independent slabs with an easy installation and removal. Large and heavy (700kg) to ensure flapping with elastomer seal at theconnections.AsiteusingindependentRUPsis availableinSaint-Aubin/France.
• The interconnected slabs with aneasyinstallation and removal following a given path. Smaller and lightweighter (<300 kg) with sanded seal at the connections (fig. 4). Two sites equipped with interconnected slabs are available in Nantes/France : In city center a 12mx 7msite and at the pavement fatigue carrousel at the Nantes campus of Gustave Eiffel University (2m x 8m site) (fig. 5).
Traditionally, the RUP slabs are non-porous, allowing for installation or removal using suction methods. However, recent advancements have introduced porous slabs to enhance structural durability. In such instances, manual arms equippedwith clamps have beendevised for handlingtheseporousslabs.
Figure 4 : Installation of RUP test structure at Gustave Eiffel University
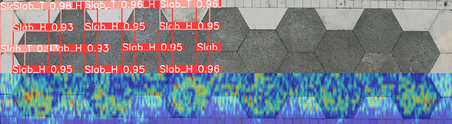


One of the current objectives is to enumerate from Deep Learning algorithms based on image captures:

• •
Hexagonal, half-edge and quarter slabs; Pavingstonessurroundingthestructure.


The final objective is to identify potential structural anomalies of RUPs through multi-technique NDT methods on both the surface and subsurface:
• • • •
Gaps between the slabs;
Differential settlements between the slabs; Spallingoftheslabs;
Rattling/flappingof theslabs.
Figure 5 : Aerial view of Nantes Gustave Eiffel University RUPs test structure with slabs identification (deep learning method) and subsurface characterization by Ground Penetrating Radar (GPR)

Use cases

Nowadays, the rapid and effective inspection, evaluation, maintenance and safe management of existing road infrastructures including highways and the overall road infrastructure network transport present a significant challenge for many operators and engineers.
The HERON system relies on enhanced intelligent control of a robotic vehicle (fig.
1), improved computer vision, Artificial Intelligence/Machine Learning methods,
along with appropriate sensors, decision-making algorithms, and Augmented Reality
(AR) components to carry out corrective and preventive maintenance tasks.
As a result, HERON enables a modular design of system operations, enhancing its
versatility and adaptability to various transportation infrastructures. This approach
helps in reducing fatal accidents, maintenance expenses, and traffic disruptions,
thereby enhancing network capacity and efficiency.
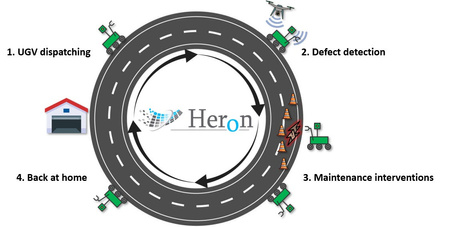
By using advanced data from various sources like Unmanned Ground Vehicle
(UGV) and Unmanned Aerial Vehicle (UAV) for surveillance, and established
methods from existing research and industry, the automated system can handle
emergency maintenance tasks when necessary. HERON is working on developing
and validating a new robotic platform designed for these tasks to be done safely,
quickly,reliably,andwithflexibility(fig.2).Figure 1 : From traditional tools to robotic sensors and actuators
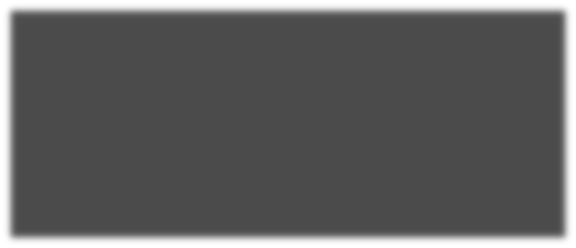


The HERON system consists of:
• Autonomousgroundroboticvehiclecomplemented byautonomousdronesfor coordination;
• Diverse robotic equipment, including sensors and actuators (tools for cutting and filling, placing and compacting surface materials, installing modular components, laser scanners for 3D mapping) embedded on the main vehicle;
• Installation of a sensing interface both to the robotic platform and within the infastructure to enable enhanced monitoring (situational awareness) of structural, functional and road surface conditions, as well as markings;
• Controlsoftware linkingthesensinginterface with theroboticequipment for actuation;
• Augmented Reality (AR) visualization tools facilitating detailed observation of surface defects and marking during surveys by the robotic system;
• Implementation of Artificial Intelligence/AI-based toolkits serving a dual purpose: a) efficiently coordinating road maintenance/upgrading workflows, and b) intelligently processing distributed data from vehicle and infrastructure sensors to ensure safe operations without disrupting routine activities or traffic flows;
•Integrationof all data intoan advancedvisualizationuser interface to support decision-making; •Communication modules enabling Vehicle-to-Infrastructure/Everything data exchange for predictive maintenance and enhanced user safety.
Figure 2 : HERON’s concept




Conclusion

HERON proposes an unified automated system along with an independent ground robotic vehicle designed for maintaining road infrastructures complemented by autonomous drones for coordination with exchange infrastructure data to enhance user safety. An extensive database is currently being constructed to enhance potential anomaly detection performance. Deep learning detectionalgorithms are alreadyshowingpromisingresults.

Bibliography

Katsamenis I. et al., Robotic Maintenance of Road Infrastructures: The HERON Project, Proceedings of the 15th Internationale Conference on Pervasive Technologies Related
toAssistive Environments(PETRA’22),pp-628-635,Corfu, Greece, 2022.
Andreoli G. et al., Subsurface characterization of Removable Urban Pavements (RUP) using Ground Penetrating Radar (GPR), 20th International Conference on Ground
PenetratingRadar (GPR 2024),Jun2024,Changchun,China(underreview).



Research Village Associations Stand presentations programme
Exhibition Booth #6 Main Hall
Day 1 | Monday – 15 April 2024
- 13:20 — 13:40 UTC | Developments in the field of innovative binders for asphalt mixtures - Sayeda Nahar (TNO, The Netherlands)
- 13:00 — 13:20 UTC | BRRC’s report - Hinko van Geelen (BRRC, Belgium)
- 13:40 — 14:00 UTC | SuChar-BiLan – Surface Characteristics of Bicycle Lanes, Luc Goubert, BRRC (Belgium)
Day 2 | Tuesday – 16 April 2024
- 13:30 — 13:50 UTC | InCITIES – Tatiana Kovacikova (UNIZA, Slovakia) and Claude Marin-Lamellet (UNI EIFFEL)
- 13:50 — 14:10 UTC | Integrated Mobility Planning for Sustainable and Livable Cities - Stefan Seer & Christian Kogler (AIT, Austria)
- 14:10 — 14:30 UTC | ADMIRAL – Elisabete Arsenio (LNEC, Portugal
Day 3 | Wednesday – 17 April 2024
- 13:10 — 13:30 UTC | ESEP4FREIGHT, Celestino Sanchez (EURNEX, Germany)
- 13:30 — 13:50 UTC | Academics4rail, Armando Carrillo (EURNEX, Germany)
- 13:50 — 14:10 UTC | SPINE – Smart Public Transport Initiatives for Climate-Neutral Cities In Europe , Lucia Cristea (EIP, Romania)
- 17:30 — 19:00 UTC | Cocktail reception - by Université Gustave Eiffel (France)
Day 4 | Thursday – 18 April 2024
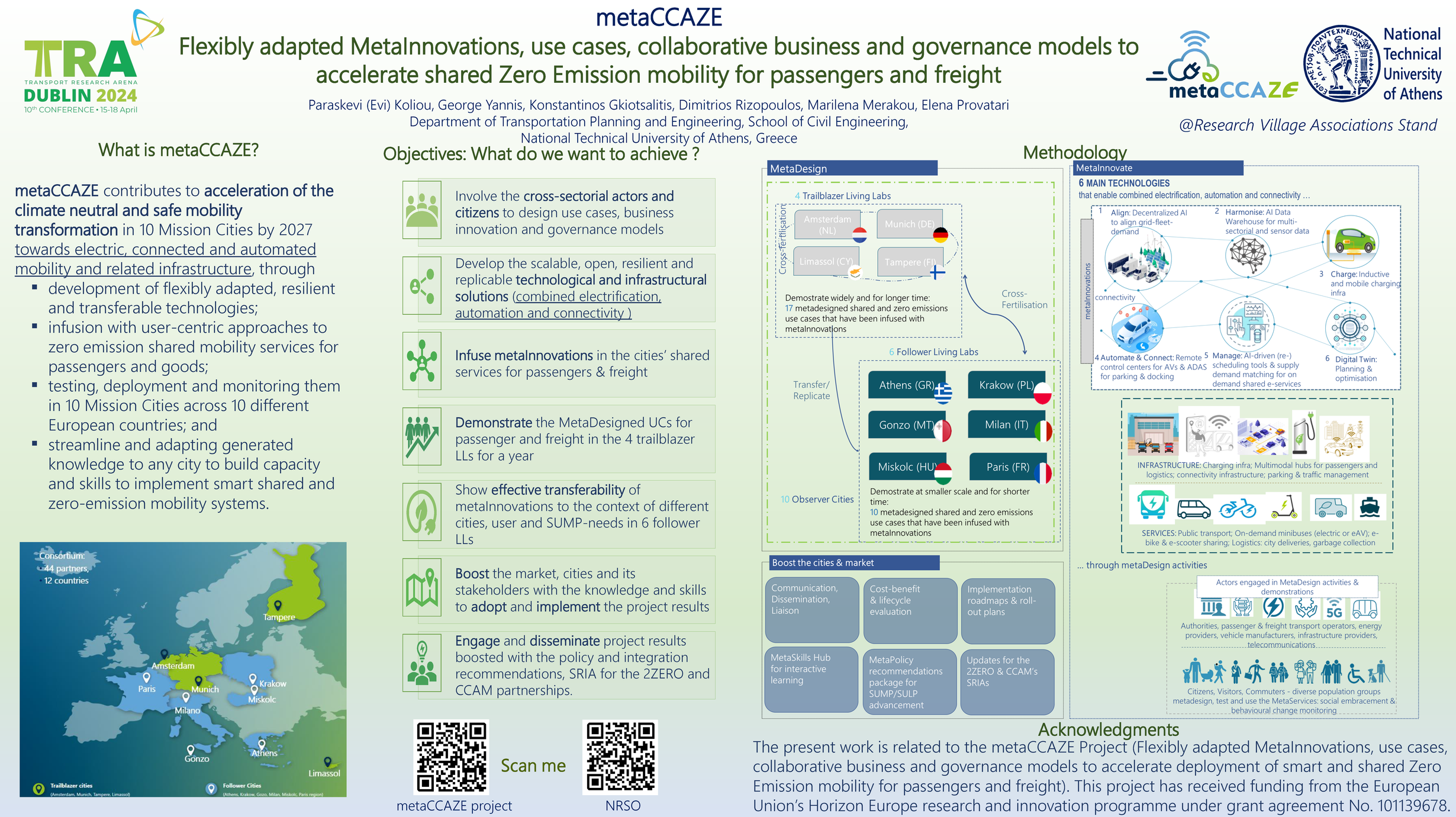
- 13:15 — 13:35 UTC | MetaCCAZE - Koliou Paraskevi and George Yannis (NTUA, Greece)
- 13:35 — 13:55 UTC | Mobility Data Spaces Landscape - Svenja Hainz (DLR, Germany)
- 13:55 — 14:15 UTC | Road Infrastructure Assessment, Modelling & Safety Evaluation - Andreas Hula (AIT, Austria)

Scan the QR code for more detailed agenda and information about the speakers


Research Village Associations Stand presentations
13:20 — 13:40 UTC - Developments in the field of innovative binders for asphalt mixtures - Sayeda Nahar (TNO, The Netherlands)
13:00 — 13:20 UTC | BRRC’s report - Hinko van Geelen (BRRC, Belgium)
13:40 — 14:00 UTC | SuChar-BiLan – Surface Characteristics of Bicycle Lanes, Luc Goubert, BRRC (Belgium)

Exhibition Booth #6 Main Hall
Sayeda Nahar
Sayeda Nahar is a researcher in the expertise group of Road Engineering at TNO, The Netherlands in the unit of Mobility and Build Environment. She has a PhD in Civil Engineering from TU Delft and worked in the industry prior to joining TNO. She has more than 10 years research experience on bituminous and asphalt materials from fundamentals to application related projects. She is an active member in Dutch and international technical committees and currently co-chairing the RILEM technical committee of ‘Physicochemical effects of polymer modified bitumen’.

Hinko van Geelen
Hinko van Geelen studied Urban Planning at the University of Amsterdam. Since 2007 he is a senior researcher at BRRC in the field of traffic safety, sustainable mobility and freight transport. He is involved in benchmarking and strategic studies on different levels.
Luc Goubert
Luc Goubert has a Ph.D. in atomic and molecular physics at Ghent State University and followed a postgraduate course in acoustics. In 2001, he became a research scientist at the Belgian Road Research Centre, where he is in charge of the Surface characteristics-Noise-Markings laboratory. He is an active member of ISO and CEN workgroups on noise and surface characteristics. The last ten years he has been active – as participant or leader – in 10 national and international research projects and produced more than 60 papers and project deliverables.
Day 1 Monday – 15 April 2024

Research Village Associations Stand presentations
Day 2 Tuesday – 16 April 2024
Tatiana Kovacikova
Prof. Tatiana Kováčiková, PhD. has been the Head of the Department of International Research Projects – ERAdiate+ at the University of Zilina, Slovakia, since July 1, 2019. She graduated from telecommunications at the University of Transport and Telecommunications in Slovakia. She is professor in Applied Informatics. She is a member of the ECTRI Executive Board. Her research interests include communication protocols, services and applications for CCAM (Connected, Cooperative and Automated Mobility), and sustainable and inclusive mobility.
Claude Marin-Lamellet
Claude Marin-Lamellet, PhD, Research Director, Deputy vice-president International at Université Gustave Eiffel, France. Since 2020, Deputy vice-president International at Université Gustave Eiffel : involved in the follow up of the design process of the new European program Horizon Europe and supervised for the university the development of the new PPP Partnership among them the CCAM, 2ZERO and DUT.
13:20 — 13:40 UTC : InCITIES – Tatiana Kovacikova (UNIZA, Slovakia) & Claude Marin-Lamellet (UNI EIFFEL)
Stefan Seer & Christian Kogler
Dr. Stefan Seer is currently a Senior Scientist at the AIT Austrian Institute of Technology in Vienna, where he heads the “Urban Development & Mobility Transformation” research group. He has 15+ years of experience managing complex projects involving diverse stakeholders from academia, public, and private sectors across continents. Stefan holds a Ph.D. in Computer Science from Vienna University of Technology and a Master’s Degree in Electronics Engineering, specializing in Computer Science and Systems Technology.
13:50 — 14:10 UTC | Integrated Mobility Planning for Sustainable and Livable Cities - Stefan Seer & Christian Kogler (AIT, Austria)
14:10 — 14:30 UTC | ADMIRAL – Elisabete Arsenio (LNEC, Portugal)Markku Mikkola (VTT, Finland), Elisabete Arsenio (LNEC, Portugal), José Manuel Vassallo (UPM, Spain) and Vânia Marecos (LNEC, Portugal)
Elisabete Arsenio
Markku Mikkola
Elisabete Arsenio is Principal Investigator at the LNEC Department of Transportation and the ADMIRAL WP2 Leader.
Markku Mikkola works as a Senior Scientist at VTT Technical Research Centre of Finland Ltd. and as the ADMIRAL WP3 leader.
Vânia Marecos
Vânia Marecos is assistant researcher at the LNEC Department of Transportation. She holds a PhD from the University of Vigo.
Jose Manuel Vassallo
Jose Manuel Vassallo is Professor in the Department of Transportation Engineering, Urban and Regional Planning at Universidad Politécnica de Madrid, Spain.

Research Village Associations Stand presentations
Day 3 Wednesday – 17 April 2024
Celestino Sanchez
Celestino is project manager in Eurnex since 2019. He has been involved as a researcher and project manager in numerous European-funded research projects in the area of transport with special focus on railways. He has wide experience in writing and coordinating proposals for research projects. During the implementation phase, he has been involved in project impact assessments, dissemination and communication tasks as well as in project management. Celestino is the technical coordinator of the ESEP4Freight project.
13:10 — 14:30 UTC | ESEP4FREIGHT, Celestino Sanchez (EURNEX, (Germany)
Armando Carrillo
Dr.-Ing. Armando Carrillo Zanuy is a railway expert with more than 20 years of experience in modelling railway systems, logistics systems and high-speed railway systems. He has a degree on Civil Engineering by the Polytechnic University of Valencia, Master of Science (railway logistics) by the Royal Institute of Technology (KTH) Stockholm and PhD on Railway Engineering by the TU Berlin. Since 2016 he is the Secretary General of EURNEX European Rail Research Network of Excellence, he is member of the Management Committee of TRA and member of the Steering Committee of ERRAC.
13:30 — 13:50 UTC | Academics4rail, Armando Carrillo (EURNEX, Germany)
Lucia Cristea
Lucia is the sole Founder and Managing Director of European Integrated Projects (EIP). She has almost 35 years of experience in designing and implementing sustainable transport and mobility projects. She has extensive experience in developing and implementing European-funded projects, being a member of the team that received the first-ever EC Framework Programme project in Romania. Lucia has been involved in many European-funded mobility projects.
13:50 — 14:10 UTC | SPINE, Lucia Cristea (EIP, Romania)
Walter Struckl
Walter Struckl is an Innovations manager at SIEMENS mobility working with Innovative Mobility Concepts and Future Trends, Consulting Projects for Top Level Management, Task leader in Europe's Rail Joint Undertaking (EU-Rail) projects.
14:10 — 14:30 UTC | Pods4Rail – Walter Struckl (Siemens mobility, Austria )
17:30 — 19:00 UTC | Cocktail reception - by Université Gustave Eiffel (France) at the Exhibition Booth #6 Main Hall

Research Village Associations Stand presentations
Day 4 Thursday – 18 April 2024
Koliou Paraskevi
Εvi Koliou is a Civil Engineer, currently working as a Research Associate at the Department of Transportation Planning and Engineering at the School of Civil Engineering of the National Technical University of Athens (NTUA). Since 2019, she holds a Civil Engineering Diploma from NTUA majoring in Transportation Engineering. Since 2024, she also holds a PhD, Doctor of Philosophy, from the Department of Civil and Environmental Engineering, at Imperial College London, United Kingdom with research topic on Intelligent Mobility and Transport Planning.
George Yannis
George Yannis is Professor and Director of the Department of Transportation Planning Engineering at the National Technical University of Athens (NTUA). He leads the NTUA Road Safety Observatory, a Center of Research and Innovation Excellence with global recognition for its highly valuable contribution to safer mobility for all, in Greece, in Europe and worldwide. He has contributed extensively in more than 315 research and engineering projects and studies and in several scientific committees of the European Commission and other International Organisations. He has published 870 scientific papers (246 in scientific journals) widely cited worldwide.
13:15 — 13:35 UTC | MetaCCAZE - Koliou Paraskevi and George Yannis (NTUA, Greece)
Svenja Hainz
Svenja Hainz is leading the team on Data Spaces at DLR’s institute for AI Safety and Security. In this capacity she is coordinating and supporting the researchers who are working on creating fair and secure data spaces for different sectors. Until January 2024 she represented the interest of the German Aerospace Center (DLR e.V.) at European level in the field of transportation research. Svenja Hainz has a Master of Science degree in transportation planning and operation from the Technical University of Berlin (Germany), 2017 as well as a Bachelor of Science degree in Industrial Engineering and Management from the Technical University of Dresden (Germany).
13:35 — 13:55 UTC | Mobility Data Spaces Landscape - Svenja Hainz (DLR, Germany)
3:55 — 14:15 UTC | Road Infrastructure Assessment, Modelling & Safety Evaluation - Andreas Hula (AIT, Austria)
Andreas Hula
Dr Andreas Hula: Studied Mathematics in the Natural Sciences at Vienna University of Technology from 2001 till January 2006. Obtained a PhD in Mathematical Finance, on tractable interest rate models, in January 2010. From December 2017 has been working as a Scientist at Austrian Institute of Technology (AIT), first in the Center of Mobility Systems (2017-2020), then in the Center for Transport Technologies (since 2021). Main area of expertise and focus of current work is building stochastic models for road safety (risk models) and infrastructure maintenance (predictive maintenance) based on probe vehicle data, aiming to improve safety, comfort and integration in digital representations of road infrastructure.